By maximizing the flexibility of human inspection, mobility, and processing, Nanotronics R&D department leverages AI for optimal integration.
By Andrew Sundstrom, Senior R&D Engineer, Nanotronics
Due to human limits and blind spots, and static process control, manufacturing errors often go undetected or unreported and are propagated. To make factories more efficient, resilient, and secure, we need to begin by reconsidering how errors are detected and remedied in the assembly line by using a more dynamic approach. Artificial Intelligence Process Control (AIPC) finds solutions to defects in near real-time, during the manufacturing process.
In conventional assembly workflows, we rely on human operators to detect manufacturing errors and ascertain how to remedy them. Even highly trained and experienced operators often lack the time and response rate necessary to make the correct and often subtle changes fast enough to have the desired effect on the system.
Operators may also miss a defect in a part early in the manufacturing cycle and continue downstream processing as usual. When a defect remains unresolved until the final inspection, it means a failure of the finished goods and wasted production material, time, and labor — a potential yield loss reaching millions of dollars.
Despite node-by-node process monitoring and adherence to statistical process control* (SPC) protocols (e.g. Six Sigma), manufacturers still rely on final human inspections of the finished product to detect and assess part defects and nodal corrections for subsequent parts.
The process waste is not just in the time and material of assembling a faulty part, but also in the lack of system-wide feedback on the cause and possible solutions to a single defect. Many errors are not the result of a one-time random occurrence, but rather, derive from an unrecognized inherent action that occurs at low frequency, such as human fatigue or environmental variations.
The typical approach of replacing error-prone, low-performing human operators with higher-performing employees is unsustainable, and does not address a more complex, unrecognized issue. The same can be said for environmental variations caused by atypical ambient conditions, for example those caused by climate change, which are outside of control specifications but are starting to become more frequent. In missing the solution to one defect, we may be missing a solution to a pattern.
To account for these limitations, and to illustrate the salient principles and problems, my team and I developed a system and Deep Learning model for the detection of process-intrinsic errors and feedback actions to correct for errors. Taken together, we call this approach Artificial Intelligence Process Control (AIPC).
Our first application for AIPC—folding a paper airplane—may seem simple in description. Yet we found that the task of folding a paper airplane contains direct parallels to complex manual assembly lines consisting of more nodes.
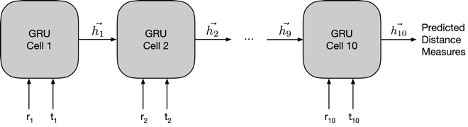
Our GRU model: 10 cells representing paper airplane folds, specified by rotations and translations, outputting estimated.
AIPC is a dynamic, interventional approach to process control, where each node subsequent to the node causing a detected error is woven into an optimization problem—the error recovery problem—and actively controlled to instantiate a solution to it. With the airplane folding model, we inserted various errors early on in the process and gave a computational model that uses targeted Gated Recurrent Unit (GRU) learning the task to efficiently search the vast space of possible recovery paths through the remaining steps in the assembly process and find the optimal one.
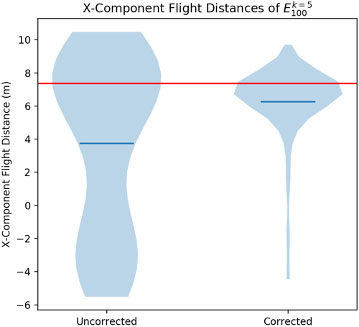
Corrected versus uncorrected flight distances. Our GRU model gave error-subsequent folds to yield close-to-canonical performance.
We chose to use a GRU model instead of a Deep Reinforcement Learning one because of its evident predictive power for structural recovery and performance and its relatively short training time. By developing and testing a GRU model on a simplified task, we leveraged simulations we developed for this problem that would not necessarily be available for a more complex problem, but the model can be applied to complex systems through transfer learning, with a shallower learning curve than if natively developed.
Our results demonstrated that a trained, predictive GRU model could give targeted corrective responses to a wide range of errors introduced or detected early in the formation of a complex manufactured object. These corrective responses were significantly superior to those given by a reasonable corrective strategy of applying error-subsequent parameter values directly from the canonical object specification.
Moreover, these results are encouraging from a Deep Learning perspective, since they demonstrate a GRU model can perform well on a problem where the sequence to be generated is selected from a vast combinatorial space, arising from a sequence-contingent manufacturing process that has no analytical solution. This highlights the practical application of Deep Learning for manufacturing, and validates the AIPC approach, which finds solutions in near real-time, while each cycle is ongoing, rather than at the end of a given cycle.
Nanotronics R&D is working with several industrial collaborators to deploy prototype AIPC solutions across a range of factory scales and types. One of the promising applications of AIPC to emerge from our research and development is securing industrial production from sophisticated cyberattacks — the subject of our next column.

Andrew Sundstrom
Andrew Sundstrom received his BA in computer science from Cornell University, and his MS in computer science and PhD in computational biology from the Courant Institute of Mathematical Sciences at NYU. He was a Senior Research Scientist at the Courant Institute, a Postdoctoral Research Fellow at the Icahn School of Medicine at Mount Sinai, and Assistant Professor of Genetics and Genomics Sciences at Mount Sinai. Andrew joined Nanotronics in 2018 as a Senior R&D Engineer, investigating how to employ machine learning and other methods from artificial intelligence to make factories and industrial processes smarter, more resilient, more productive, and more secure. Andrew has 28 years of professional experience, 18 of which are outside of academia, where he has made contributions as a software engineer and researcher at Prime Factors, Nortel Networks, IBM T.J. Watson Research Center, and Morgan Stanley. Andrew has 9 peer-reviewed publications (5 as first author) and 2 issued patents. His complete bio is available at aesundstrom.com.
Reference: Andrew Sundstrom, et al. “A computational model for decision-making and assembly optimization in manufacturing”. Proceedings of the American Control Conference 2020, Denver, Colorado, USA (31 Jul 2020). [doi: 10.23919/ACC45564.2020.9147715]
* A static, non-interventional approach to process control, invented by Walter A. Stewhard and developed by W. Edwards Deming, where well-defined statistical properties are passively observed to pass or fail at each node, and only after the last node’s processing is a decision made as to whether to keep or discard the manufactured product.

Forging the Next 250 Years: Powering the Next Era of American Manufacturing
As manufacturers offer more customization than ever before, managing product complexity has become a critical challenge. Tune in with Dan Joe Barry, Vice President of Product Marketing at Configit, who explores how companies are tackling the growing number of product configurations across engineering, sales, manufacturing, and service. He explains how Configuration Lifecycle Management (CLM) helps organizations maintain a single source of truth for configuration data. The result: fewer errors, faster quoting, and the ability to deliver customized products at scale.
Get In Touch
Google news and SEO compliant, Industry Today’s state-of-the-art digital media platform offers bespoke media campaigns that target key decision makers and buyers to achieve your marketing and promotional goals.
![]()
Contribute
Showcase your brand and promote your business to our highly targeted audience. We offer detailed Google Analytics with measurable ROI to assure success. Submit your content for review by our Editorial team who will contact you to discuss the project further.
About Us
Reach Your Targeted Audience and Grow Your Business. Learn more About Industry Today.
Contact Us

© 2026 Industry today. All Rights reserved.